Description des travaux
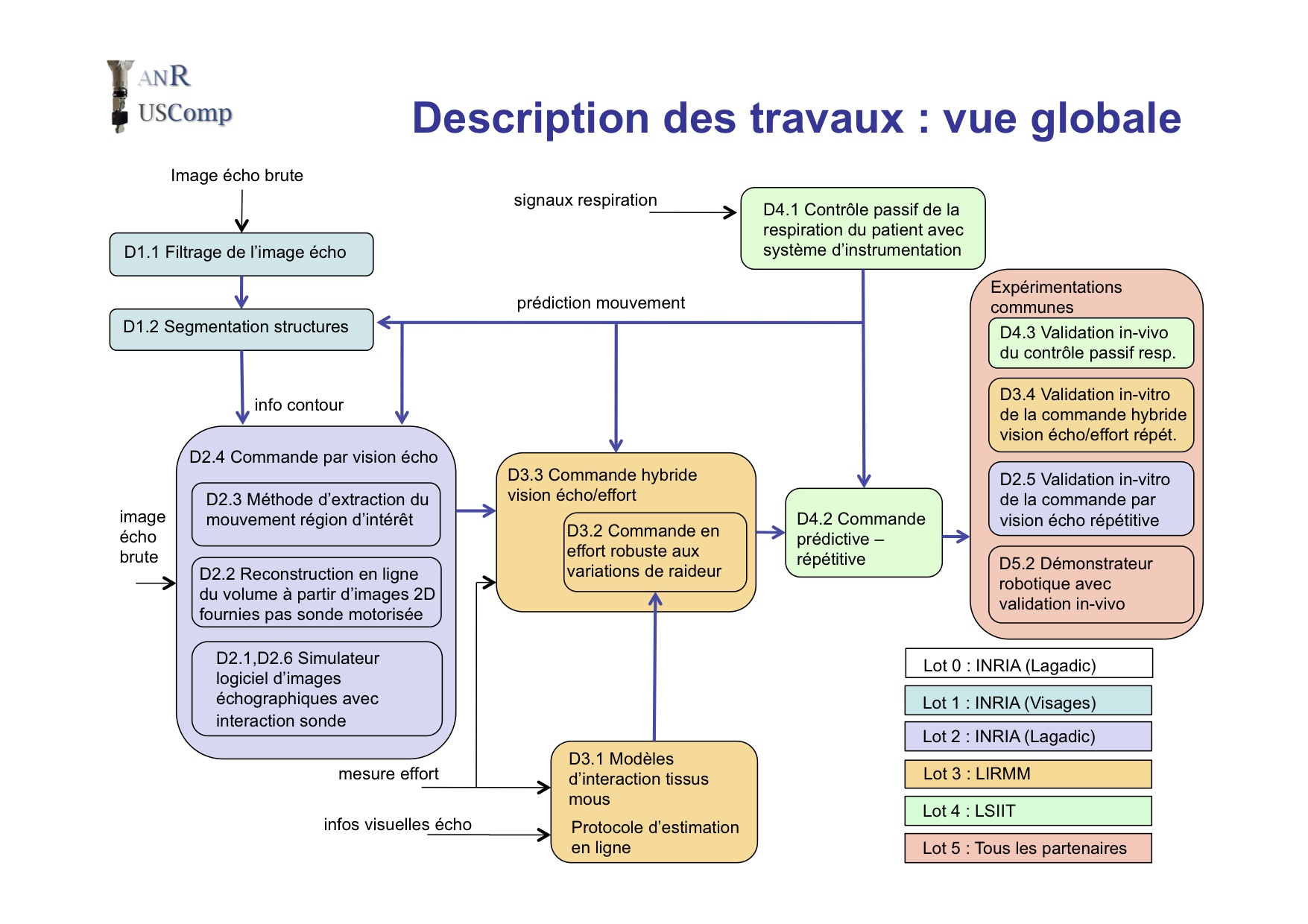
Tâche 1 (lot 1) : Traitement d’images échographiques temps réel
Cette tâche a pour objectif de fournir des solutions concernant le traitement d’image échographique temps réel. Elle porte plus précisément sur le développement d’algorithmes permettant le filtrage de l’image échographique et la segmentation en ligne des structures anatomiques observées. Une forte contrainte est de fournir des solutions rapides permettant leurs utilisations à la cadence vidéo de 25 images par seconde.
Tâche 2 (lot 2) : Asservissement visuel utilisant les images échographiques
Cette tâche s’intéresse principalement à la commande référencée image échographique. Elle porte sur la modélisation des informations visuelles qui sont pertinentes à la réalisation de la tâche robotique de stabilisation et sur l’étude et la mise en œuvre de l’asservissement visuel. Cette tâche concerne également le développement d’un simulateur logiciel permettant de fournir en temps réel une image échographique (réaliste) perçue par une sonde virtuelle interagissant avec des tissus déformables. Le simulateur sera utilisé par les partenaires pour développer et tester leurs travaux sur la commande du système.
Tâche 3 (lot 3) : Modélisation des tissus mous et commande en effort
Ce lot porte sur la modélisation mécanique des tissus mous et l’étude de nouvelles approches de commande utilisant la mesure de l’effort exercé par la sonde au contact de la peau. Ces dernières auront la particularité de s’adapter en ligne à l’environnement rencontré afin de gérer les efforts de contact lors des mouvements rapides de synchronisation de la sonde. Ce lot s’intéresse également à développer de nouvelles méthodes de commande hybride fusionnant l’effort et la vision.
Tâche 4 (lot 4) : Commande prédictive
Ce lot consiste à étudier des modèles prédictifs permettant d’anticiper les variations de l’environnement observé. Un aspect scientifique novateur est l’étude de modèles basés sur l’utilisation de la mesure du débit respiratoire du patient. Ce lot porte également sur l’élaboration de commandes prédictives permettant de déplacer rapidement la sonde afin de rejeter au maximum les perturbations induites par le mouvement physiologique du patient et de permettre ainsi la stabilisation de l’image.
Tâche 5 (lot 5) : Expérimentations communes
Ce lot regroupe les expérimentations communes qui sont planifiées pour garantir le succès de la mise en œuvre d’un démonstrateur robotique final regroupant et démontrant les contributions méthodologiques de l’ensemble des partenaires.



