Modélisation des propriétés mécaniques des tissus et commande en effort
Modélisation des propriétés mécaniques des tissus et commande en effort
L’objectif des travaux de cette tâche est de modéliser l’interaction de la sonde échographique avec les tissus mous (cutanés et sous-cutanés) et de caractériser les relations entre la déformation et les efforts appliqués pour ensuite améliorer les performances de la boucle de commande en effort lors de la compensation du mouvement.
Les premiers travaux ont concerné l’analyse et l’évaluation de modèles visco-élastiques des tissus (Kevin Boltzmann, Kelvin-Voigt, Maxwell, …) reliant les efforts appliqués à la déformation des tissus sous-jacents .
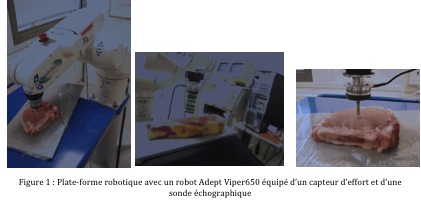
Pour étudier et comparer le comportement de ces modèles, nous utilisons une plate-forme robotique de l’équipe DEXTER (Figure 1) et nous avons développé un protocole expérimental pour l’estimation des paramètres à partir de la mesure des informations d’effort et de position du robot.
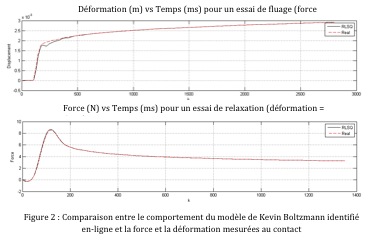
Une étude expérimentale (essais de fluage et relaxation) in-vitro sur pièce anatomique (pièce de viande) a permis de comparer différents modèles proposés dans la littérature et de choisir le modèle le plus adéquat pour caractériser l’interaction instrument-tissus mous. L’estimation des paramètres de ces modèles a été effectuée en ligne par une technique de moindres carrés récursifs permettant d’adapter les valeurs des paramètres aux variations des propriétés mécaniques des tissus. La figure 2 montre un exemple de comportement du modèle de Kevin-Boltzmann lors d’essais de fluage (échelon de force de 1N) et de relaxation (échelon de position de 5mm) sur une pièce de viande.